Ensenso SDK Un solo software para todas las cámaras 3D Ensenso
El paquete gratuito de software Ensenso SDK incorpora una única interfaz universal para todas las cámaras 3D Ensenso.
Ensenso PartFinder
Ensenso PartFinder le permite cargar sus propios modelos CAD y localizarlos después en las nubes de puntos de sus cámaras 3D Ensenso. Gracias al uso combinado de datos de profundidad, textura y normales de superficie, se pueden completar con éxito incluso las tareas de búsqueda más complejas. La funcionalidad PartFinder está incluida en la versión estándar de NxLib, aunque necesita una licencia específica para poder utilizarla. En esta sesión de IDS Vision Channel le explicamos exactamente cómo funciona.

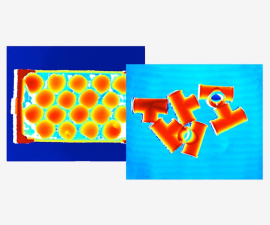
Semi Global Matching
El algoritmo de correlación superdensa Semi Global Matching proporciona nubes de puntos muy densas de gran calidad.

Calibración del rango de trabajo
Defina el inicio del rango de trabajo de forma sencilla con ayuda de una placa de calibración Ensenso.

Vistas virtuales
Las imágenes de altura telecéntricas con un tamaño de píxel fijo facilitan enormemente el procesamiento de datos.

Calibración manual y visual
Calibre una cámara estéreo guiada por robot o instalada fija en relación con el sistema de ejes robótico.

Adecuación de primitivas
Extraiga elementos como capas, bolas o cilindros de las nubes de puntos capturadas.

Seguimiento de patrones
Mida la posición de la placa de calibración con una precisión micrométrica, así como la rotación en tiempo real.

API basada en JSON
Utilice la API estructurada, orientada a objetos y fácilmente ampliable basada en el formato JSON para C, C++ y C#.

Conectividad remota
Intercambie datos de proceso o parámetros con un acceso API a través de interfaces DLL o TCP.

Multi-View
Combine varias cámaras estéreo en un sistema de captura único para nubes de puntos de alta textura.

Renderización de escenas
Obtenga una representación virtual en 3D de las superficies capturadas por todas las cámaras estéreo.

PatchMatch Stereo Matching
El algoritmo aleatorio para encontrar coincidencias de diferentes secciones de la imagen permite la correspondencia estéreo en todo el espacio de trabajo en una sola ejecución (utilizable con y sin FlexView).
NxView
NxView es un programa demo con código fuente que muestra las principales funciones de la biblioteca NxLib. Permite abrir una o varias cámaras estéreo y de color y visualizar los datos de imagen y de profundidad. Se pueden ajustar en directo parámetros como el tiempo de exposición, binning, AOI o el rango de medición de la profundidad.
NxLib
NxLib es la biblioteca central de SDK. Contiene el algoritmo estéreo de correlación, así como todas las funciones de calibración y procesamiento.
HALCON Interface
La HALCON Image Acquisition Interface permite integrar fácilmente las cámaras Ensenso en HALCON y HDevelop.
Programas demo
Los scripts de HDevelop y numerosos programas demo para C, C++ y C# ayudan a aprender a usar la API NxLib. El programa demo NxView también está disponible de forma gratuita como código fuente.