
Serie Ensenso N
3d vision: precisión, resistencia y sencillez
Interfaz GigE
Plug & Play
Sensor CMOS
3D Vision
Conector con rosca
Power-Over-Ethernet
Grado de protección IP65/67
Disparador & flash
Ligera
Pre-calibrada
Sistema de cámaras 3D estéreo robusto y compacto
La serie Ensenso N ha sido concebida específicamente para el uso en entornos sometidos a condiciones muy duras. Gracias a su diseño compacto, la serie N ahorra espacio y es adecuada para la captura 3D de objetos estáticos o en movimiento en aplicaciones estacionarias o móviles sobre un brazo robótico. El proyector integrado proyecta mediante una máscara de patrones con patrón de puntos aleatorio una textura de gran contraste sobre el objeto a reproducir para compensar así, incluso en condiciones de luz adversas, las texturas pobres o inexistentes. Todas las cámaras están precalibradas y, por consiguiente, son muy fáciles de configurar.


Apta para uso industrial
El conector GPIO para disparador y el flash en todos los modelos hace que sean idóneas para la industria. Para situaciones en las que se precisa una gran resistencia están disponibles las series de cámaras 3D Ensenso N3x y Ensenso N4x con la clase de protección IP65/67; es decir, con protección frente a la suciedad, al polvo, a las salpicaduras de agua y a los productos de limpieza.
Serie N4x: ligera y de coste optimizado
La electrónica estéreo 3D de la nueva serie N4x está desacoplada totalmente de la carcasa, por lo que se puede utilizar un composite ligero para la carcasa y reducir así el coste de fabricación de la familia de cámaras 3D.
Gracias a su reducido peso, los modelos Ensenso N4x son también adecuados para su uso en brazos robóticos de colaboración, que tienen una fuerza de propulsión limitada para proteger al personal humano. El tacto de la superficie de plástico y los bordes redondeados también ayudan a minimizar las lesiones.


Serie N3x: para las condiciones más duras
La carcasa de aluminio de los modelos N3x garantiza una óptima disipación del calor de los componentes electrónicos y, por lo tanto, una luminosidad estable incluso en condiciones ambientales extremas. Esto asegura una alta calidad y consistencia de los datos 3D.
Además, la estructura metálica permite integrar de forma muy flexible y sólida los sensores CMOS con unos ángulos de vergencia de entre 2° y 10°, lo que abre la posibilidad a aplicaciones con distancias del objeto muy cortas.
Tabla comparativa
N3x |
N4x |
|
|---|---|---|
|
|
|
Sistema 3D |
"Projected Texture Stereo Vision" - Sistema para la captura de superficies sin textura |
"Projected Texture Stereo Vision" - Sistema para la captura de superficies sin textura |
Sensores CMOS |
Global Shutter, 1936 x 1216 Pixel (2,3 MP) |
Global Shutter, 1936 x 1216 Pixel (2,3 MP) |
Distancias focales |
6 - 16 mm |
6 - 16 mm |
Proyector de patrones |
LED azul (465 nm) o infrarrojo (850 nm) + FlexView - Desplazamiento de patrón (sólo N36) |
LED azul (465 nm) o infrarrojo (850 nm) + FlexView - Desplazamiento de patrón (sólo N46) |
Distancia de trabajo |
mín. 270 mm |
mín. 330 mm |
Campo visual |
máx. 3970 mm |
máx. 3970 mm |
Interfaz |
Gigabit Ethernet |
Gigabit Ethernet |
Imágenes por segundo |
10 (1,3 MP), 30 (2x binning) |
10 (1,3 MP), 30 (2x binning) |
Fuente de alimentación |
12 V - 24 V DC / PoE (power over ethernet) |
12 V - 24 V DC / PoE (power over ethernet) |
Carcasa |
Aluminio |
Composite con cantos redondeados |
Dimensiones (An x Al x P) (incl. conexiones) |
192 x 50 x 52 mm |
193 x 52 x 60 mm |
Peso |
650 g |
550 g |
Grado de protección |
IP65/67 |
IP65/67 |


*Para obtener valores detallados sobre el modelo específico, como por ejemplo la precisión Z o la resolución XY, utilice el selector de cámaras Ensenso.
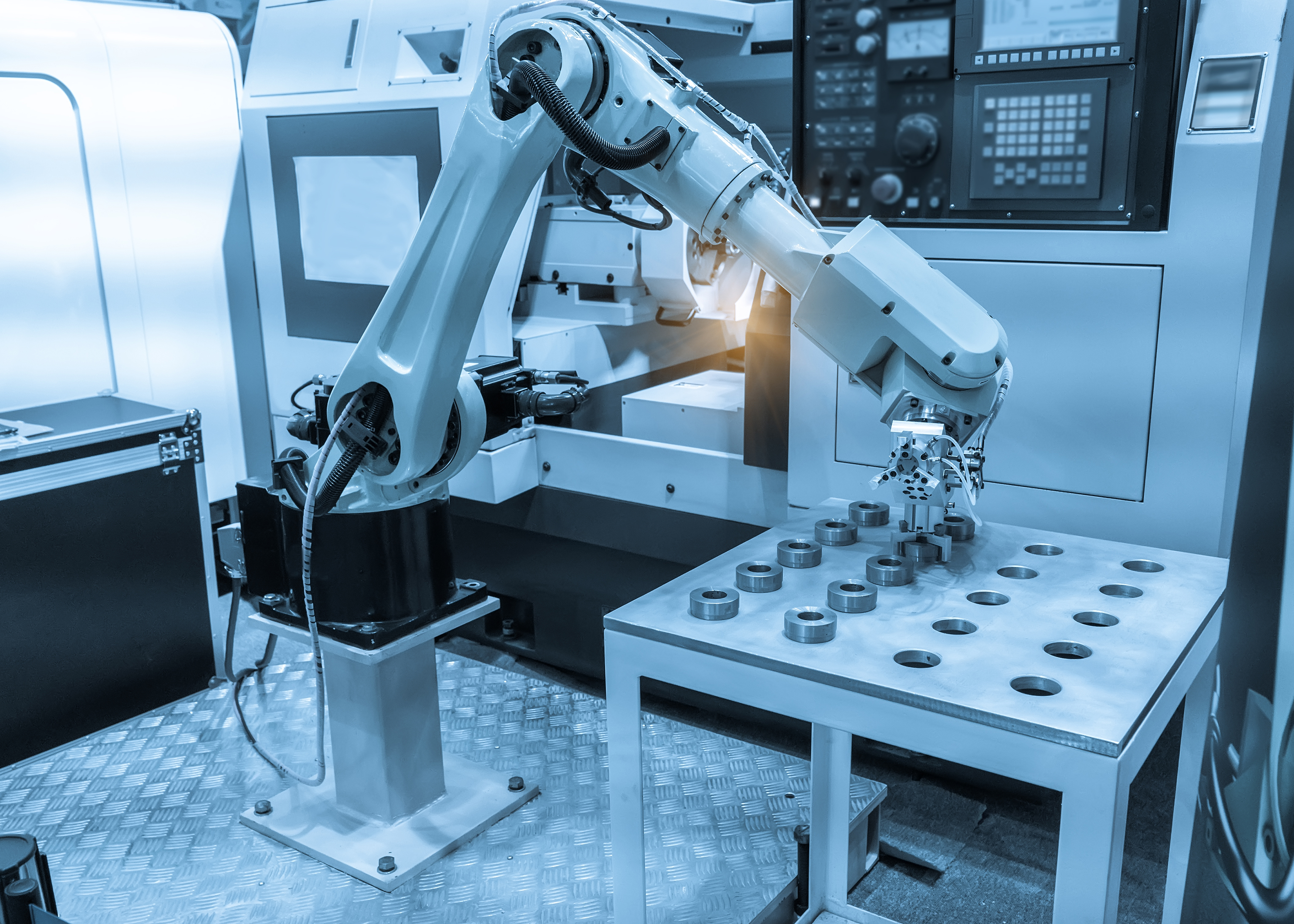
Aplicaciones
- Identificación, localización y clasificación de objetos 3D en ámbitos como el control de calidad o la preparación de pedidos
- Reconstrucción de objetos 3D
- Automatización de fábricas
- Aplicaciones de robótica guiada por visión como bin picking o tareas colaborativas
- Montaje en cintas transportadoras
- Automatización logística, como paletización o despaletización
- Sistemas de almacenamiento automatizados

TM Plug&Play
Las cámaras 3D Ensenso N3x han obtenido la certificación "TM Plug&Play" de Techman Robot. A partir de ahora, los usuarios pueden conectar las cámaras 3D a los ordenadores industriales de TM Robot y empezar a trabajar con una aplicación de bin picking 3D sin necesidad de desarrollar primero una aplicación propia de procesamiento de imágenes. Esto supone un considerable ahorro de tiempo en términos de desarrollo e implementación.
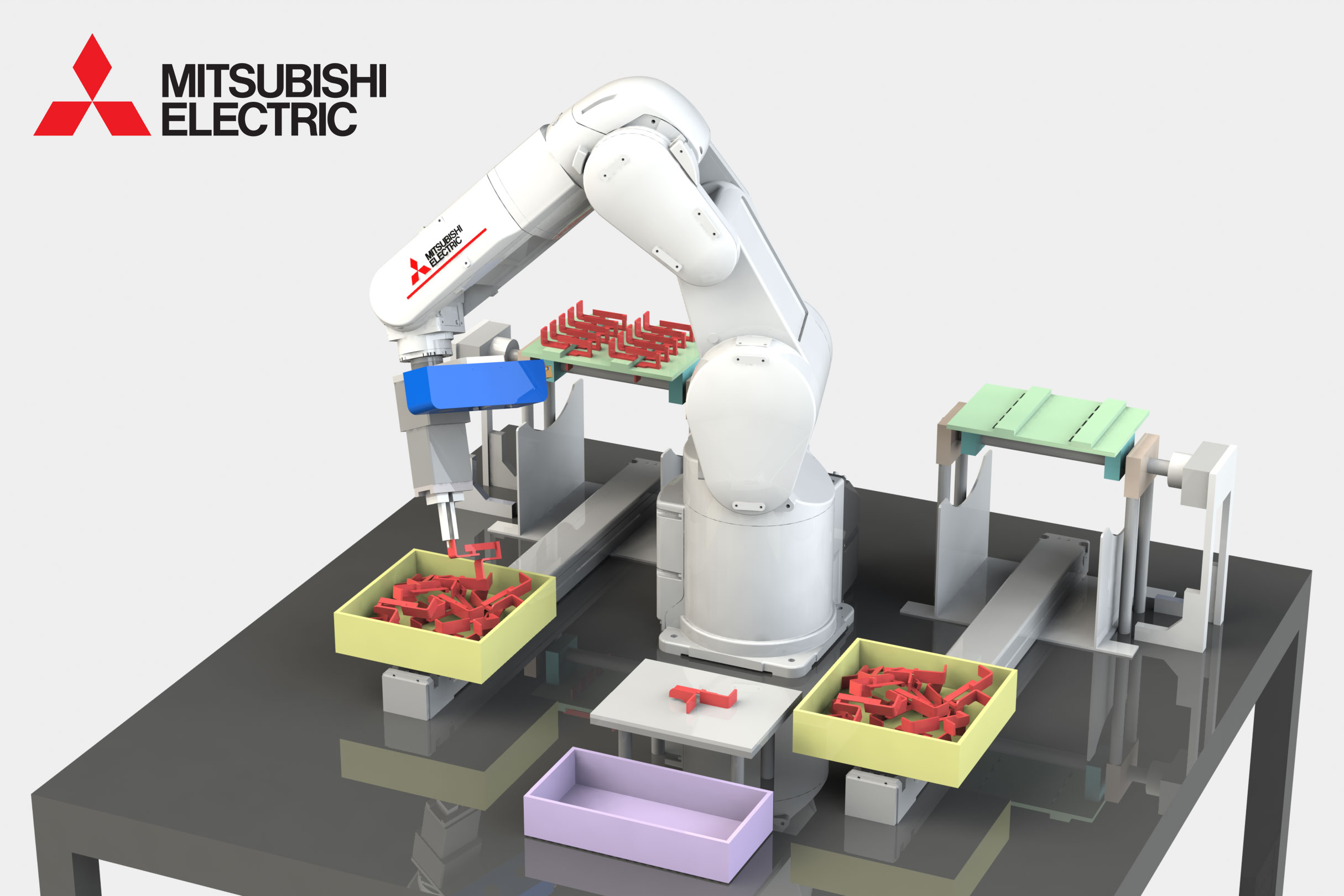
MELFA-3D Vision 3.0
La Ensenso N3x es la cámara de visión 3D estándar de Mitsubishi Electric MELFA-3D Vision 3.0, que permite realizar un «picking» a gran velocidad con su exclusivo proceso de reconocimiento sin modelos. MELFA-3D Vision 3.0 es un software para cámaras de visión 3D para pequeños robots que realiza mediciones de pequeño tamaño, alta velocidad y alta precisión.
Se conecta fácilmente a la serie Ensenso N3x. Sus pequeñas dimensiones y su ligero peso permiten una configuración flexible del sistema. Ampliando la distancia de trabajo y el campo de visión, el sistema puede aplicarse a diversas escenas, y puede manejar con flexibilidad desde el trabajo de ensamblaje de precisión de piezas pequeñas hasta la recogida a granel de grandes palés.
La "función de calibración automática" alinea automáticamente el robot y la cámara 3D. Esto facilita enormemente el trabajo de ajuste.
Ensenso SDK
Las cámaras de la familia Ensenso N se pueden configurar y operar fácilmente por medio del Ensenso SDK. Además de asistentes que facilitan la instalación y la calibración de las cámaras 3D, el kit integra la opción de realizar un procesamiento de imágenes basado en GPU, acelerando así el procesamiento de datos 3D.
- Un solo paquete de software (Ensenso SDK para Windows y Linux) para todos los modelos Ensenso
- Programas de ejemplo con código fuente para MVTec HALCON, C, C++, C#
- Generación de una única nube de puntos 3D a partir de todas las cámaras del modo multicámara
- Generación directa de las nubes de puntos 3D desde varias perspectivas
- Calibración mano-ojo del robot
- Integración de las cámaras industriales uEye, por ejemplo para registrar información cromática adicional o códigos de barras
Entre muchas otras cosas, a partir de la versión 3.3 del Ensenso SDK puede localizar objetos en nubes de puntos 3D a partir de sus propios modelos CAD con ayuda de Ensenso PartFinder. Para utilizar este módulo de software necesita una licencia específica. En este vídeo le explicamos todas las funcionalidades y ventajas que presenta esta herramienta para sus aplicaciones.
Ejemplos prácticos
Planifique su proyecto
Selector de Ensenso
Nuestro selector de cámaras Ensenso le facilitará la tarea de seleccionar sus componentes. Después de introducir las condiciones de trabajo en el configurador online, esta solución le propone la mejor combinación posible de sistemas Ensenso para su aplicación.


