Determinación de la posición basada en visión artificial para trabajos de montaje y medición en instalaciones submarinas
Posición exacta en el ancho mar
El mundo submarino es uno de los entornos de trabajo más hostiles que existen. Además de la falta de visibilidad, las altas presiones y las corrientes, la variación constante de las condiciones del entorno, la corrosión y las incrustaciones convierten el desarrollo de trabajos subacuáticos en un auténtico desafío. Sin embargo, ese es el pan de cada día para los operadores de plataformas y aerogeneradores marítimos tanto en el momento de construir las instalaciones como a la hora de realizar su mantenimiento. Un requisito básico esencial para ejecutar trabajos de cualquier tipo en alta mar es poder determinar siempre la posición de forma precisa. Con la cámara de navegación NAV CAM SUBSEA, Forssea Robotics ofrece un sistema todo en uno destinado a vehículos submarinos para determinar de forma exacta la posición relativa y absoluta de instalaciones subacuáticas. Dicho sistema integra una cámara industrial de IDS Imaging Development Systems GmbH para obtener la visión que necesita.
Aplicación
Las tareas de posicionamiento y medición en instalaciones marítimas son labores muy exigentes. Esto es así cuando se necesita determinar la posición de instalaciones sueltas en alta mar como cuando hay que alinear unos aerogeneradores respecto de otros en un parque eólico, por ejemplo. La precisión es esencial.
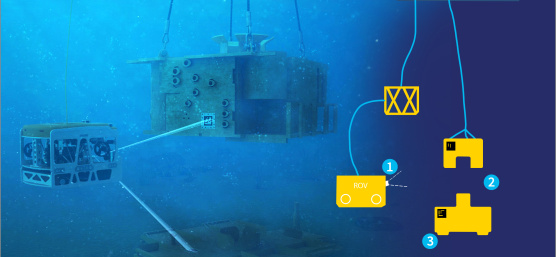
Dadas las condiciones ambientales extremas que deben afrontar los equipos utilizados en este entorno, su diseño debe ser lo más sencillo y lo más inteligente posible. La cámara de navegación submarina de Forssea Robotics resuelve esta cuestión utilizando marcadores. Detecta y sigue las marcas colocadas en instalaciones submarinas, como los componentes de la base de las turbinas eólicas, por ejemplo. Sobre esta base calcula su posición relativa y absoluta creando así el punto de partida para la ejecución de trabajos de montaje y prospección. Este método permite determinar la posición exacta de los componentes.

La cámara precalibrada monitoriza las marcas y envía imágenes en tiempo real para su tratamiento en el ordenador integrado. Este, a su vez, reúne la información visual con ayuda de un software especial (V-LOC-System, Visual Localisation System) y genera un mensaje de navegación. Por consiguiente, todos los cálculos se llevan a cabo directamente en el interior de la cámara. Esto evita la transmisión de datos de banda ancha a la parte superior.

La NAV CAM SUBSEA ha sido diseñada para el montaje en vehículos submarinos teledirigidos o autónomos (ROV o AUV), que utilizan directamente como centro de control y de navegación. Dispone de un procesador gráfico, de un sensor de presión y de un sistema de navegación interactivo. Así, para los sistemas ROV existentes, es el primer paso para conseguir habilidades autónomas, dado que dispone de inteligencia en tiempo real: V-LOC calcula el curso direccional y la posición de la marca. A continuación el ROV adopta el curso de la cámara, la inclinación y el ángulo de giro. La exactitud XYZ relativa con una separación de 3 m del ROV con respecto al objeto destino es de unos 3 mm. Este valor es de unos 10 - 20 mm en sistemas equivalentes de código abierto. Los marcadores de Forssea cuentan con una vida útil certificada superior a los 25 años y son resistentes a las incrustaciones marinas.

La cámara de navegación también se puede utilizar en el sistema ROV ARGOS, otra solución desarrollada por Forssea Robotics. ARGOS es un ROV ligero e inteligente diseñado para trabajar a profundidades de hasta 500 m. Con unas sencillas modificaciones, el vehículo puede sumergirse hasta los 2000 m de profundidad. Dado que la cámara Forssea utiliza etiquetas de código abierto, el cliente no está limitado a sistemas propietarios. La NAV CAM es totalmente compatible con sensores giroscópicos externos (sensores de velocidad o posición) o con sistemas de medición de arqueo de los buques. También está disponible con un On-Demand-KI-Toolbox para identificar y hacer el seguimiento de objetos sin utilizar marcadores.
Cámara
El campo de aplicación de la cámara de navegación para vehículos submarinos impone ciertos requisitos también a la cámara industrial que integra, dado que las imágenes de ésta sirven de base para todos los cálculos de posición.
«Buscábamos una cámara que cubriera todas las necesidades relativas al rango dinámico, a la sensibilidad y a la linealidad, pero que fuera compacta y encajara en nuestro presupuesto. Y la encontramos en IDS. La UI-5270CP-C-HQ Rev.2 ha cumplido todas nuestras expectativas.»
Este modelo de cámara, con el sensor de 1/1.8“ global shutter IMX265 de Sony, ofrece una resolución de 3,2 MP (2056 x 1542 píxeles) y una frecuencia de imagen de 38 fps mediante la interfaz GigE. Su sensor de alta sensibilidad lumínica se considera uno de los mejores sensores de imagen CMOS en la categoría de 3 MP y garantiza una excelente calidad de imagen incluso con poca luz.
La cámara industrial UI 5270CP-C-HQ Rev.2 forma parte de la familia de productos uEye CP. CP significa "Compact Power". Con su potencia concentrada en un diseño compacto, es perfecta para aplicaciones industriales de todo tipo y ofrece la máxima funcionalidad con un amplio preprocesamiento de píxeles. Las cámaras proporcionan datos a velocidad GigE completa y la función PoE ("Power over Ethernet") hace posible el funcionamiento con un solo cable de hasta 100 metros. Los usuarios pueden elegir entre un gran número de sensores CMOS con una amplia gama de resoluciones. Las cámaras uEye CP son adecuadas, entre otras, para aplicaciones de los sectores de la automatización, la automoción, la tecnología médica, las ciencias de la vida o la logística. Y también en el campo de la robótica, formando parte por ejemplo de un vehículo submarino, con su carcasa patentada de tan solo 29 x 29 x 29 milímetros.

Perspectiva
Las cámaras desarrolladas por Forssea Robotics se utilizan principalmente en la industria submarina. Sin embargo, la empresa está trabajando en una versión "in air" de la tecnología de posicionamiento basada en visión artificial.
La cámara NAV CAM AIR es un centro de control de inclinación y posicionamiento integral de superficie que ha sido diseñado, por ejemplo, para el control de sistemas de soporte de aerogeneradores y de otras instalaciones marítimas. También en este caso todas las imágenes se procesan en tiempo real con el software de la casa con el fin de lograr un posicionamiento exacto.
El tratamiento de imágenes ofrece un amplio abanico de posibilidades de aplicación en tierra, sobre el agua o bajo ésta. Esto facilita cualquier tipo de tarea, las agiliza o simplemente las hace posible. Así, se pueden colocar los aerogeneradores en la posición exacta gracias, en este caso, a la cámara industrial IDS integrada en la NAV CAM SUBSEA. Solo queda esperar a que sople el viento.
Forssea Robotics
Forssea Robotics desarrolla soluciones robóticas totalmente integradas para reducir costes operativos en los mercados energéticos marítimos. Las herramientas submarinas Forssea combinan hardware plug & play económico, inteligencia adecuada integrada y vigilancia en tiempo real.

uEye CP
Modelo utilizado: UI 5270CP-C-HQ Rev.2

Desde hace más de diez años, diseña perfiles empresariales, folletos y estudios de casos, y se encarga tanto de temas corporativos como de la comunicación técnica de productos. Con su experiencia en comunicación estratégica B2B, se encarga de transmitir mensajes claros y contenidos bien fundamentados.
Su proyecto
¿Cómo podemos ayudarle en su proyecto? ¡Juntos encontraremos la solución que necesita!
Vision Channel
Vídeos y sesiones en directo sobre visión artificial.
Boletín de noticias
Manténgase al día y suscríbase a nuestro boletín informativo.
Aplicaciones
Descubra cómo las cámaras industriales están diseñando el futuro.