
Sistema asistido por robot con cámara 3D Ensenso 3D para la manipulación segura de residuos nucleares
Tratar con cuidado
El desmantelamiento de las instalaciones nucleares plantea grandes retos a los operadores. El volumen de los residuos nucleares, ya sea para ser eliminados o encapsulados, está aumentando de forma abrumadora en todo el mundo. La necesidad de sistemas de automatización para manipular residuos nucleares es cada vez mayor, pero la industria nuclear desconfía de los métodos de control robótico totalmente autónomos por razones de seguridad; en entornos peligrosos, se prefieren los robots industriales controlados a distancia. Sin embargo, es difícil y en ocasiones incluso imposible de controlar la ejecución de tareas tan complejas como el agarre o el corte por control remoto de objetos desconocidos utilizando joysticks y cámaras de videovigilancia.
Con el fin de simplificar este proceso, el National Centre for Nuclear Robotics, bajo la dirección del Extreme Robotics Lab de la Universidad de Birmingham, en Gran Bretaña, está investigando distintas opciones de manipulación automatizada para clasificar y separar residuos nucleares. Sus investigadores han desarrollado un sistema auxiliar robótico que permite un control "compartido" para ejecutar tareas de manipulación complejas mediante feedback háptico e información de imágenes proporcionadas por una cámara 3D Ensenso. De ese modo el operador tiene en todo momento el control de las acciones automatizadas del robot y puede intervenir en caso de que el sistema falle.
Aplicación
Cualquiera que haya probado una de esas máquinas de feria en las que hay que manipular una pinza puede confirmarlo: intentar agarrar un objeto con una pinza controlada manualmente es todo menos trivial. Si bien los intentos fallidos de atrapar un conejito de peluche no causan mayores problemas que la frustración del aspirante, un fallo puede tener consecuencias desastrosas cuando se trata de manipular residuos radiactivos. Para evitar accidentes con graves consecuencias y daños personales y medioambientales, el robot debe poder reconocer exactamente los objetos radiactivos de la escena y manipularlos con precisión. Está literalmente en manos del operador; de él depende identificar las posiciones de agarre correctas.
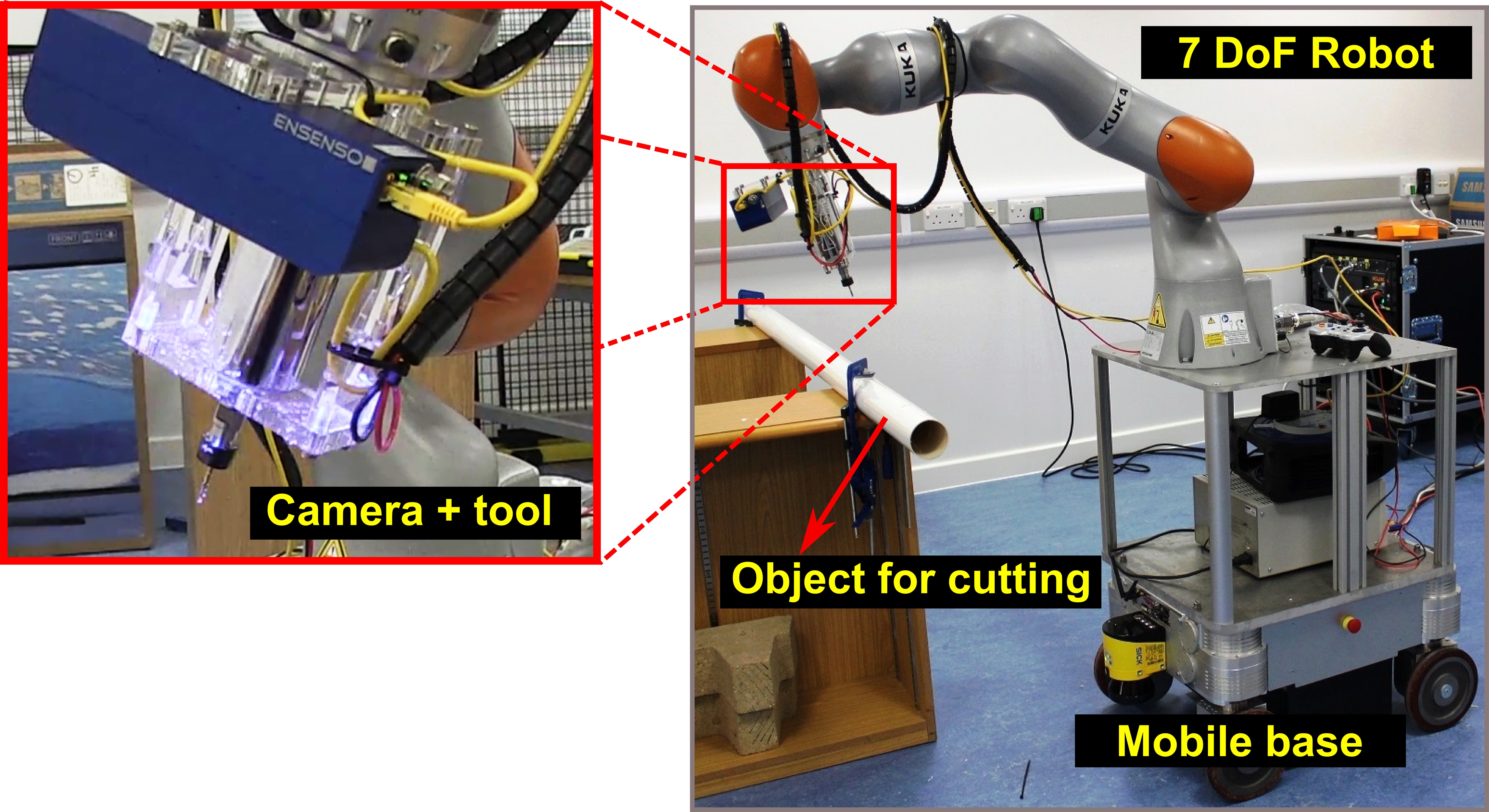
Al mismo tiempo, debe evaluar correctamente la cinemática inversa y determinar sin errores los ángulos de las articulaciones del brazo del robot para posicionarlo correctamente y evitar colisiones. Los investigadores británicos han ideado un sistema auxiliar que simplifica y acelera enormemente esta tarea combinando un robot industrial estándar dotado de pinzas paralelas y una cámara 3D Ensenso N35.
El sistema escanea de forma autónoma los residuos y genera un modelo 3D en forma de nube de puntos. Esto se consigue con una precisión extrema dado que las cámaras 3D Ensenso operan según el principio de la visión estereoscópica (Stereo Vision), que imita la visión humana. Dos cámaras captan imágenes de un objeto desde posiciones distintas. Si bien las imágenes obtenidas por las dos cámaras parecen idénticas, hay diferencias en la posición de los objetos. Dado que los datos de distancia y ángulo de visión de la cámara y de distancia focal de las ópticas son conocidos, el software de la cámara Ensenso puede determinar las coordenadas 3D de cada píxel de la imagen. En este caso la cámara captura la escena desde distintas posiciones de escaneado y las imágenes se combinan para obtener una superficie 3D completa desde todos los ángulos. Las rutinas de calibración de Ensenso ayudan a transformar las nubes de puntos en un sistema de coordenadas global, lo que mejora la imagen virtual completa. La nube de puntos resultante contiene así toda la información espacial del objeto necesaria para comunicar al robot la posición correcta de agarre o de corte.

Con ayuda del software, la cámara Enseno 3D se encarga de percibir y evaluar los datos de profundidad para el operador, ahorrándole de ese modo un gran esfuerzo cognitivo. El sistema de asistencia combina las características hápticas del objeto que se va a agarrar con un algoritmo de prensión especial. "Nuestro sistema utiliza la nube de escenas para generar automáticamente varias posiciones de agarre estables.
«Dado que las nubes de puntos captadas por la cámara 3D son de alta resolución y densidad, es posible generar posiciones de agarre muy precisas para cada objeto de la escena.»
Sobre esta base nuestro "algoritmo de ránking de hipótesis" determina cuál es el mejor objeto para la captura en función de la posición del robot", explica el Dr. Naresh Marturi, Senior Research Scientist del National Centre for Nuclear Robotics.
El principio es similar al del Mikado, un juego de habilidad en el que hay que ir retirando uno a uno los bastones de madera sin tocar los otros bastones. El guiado predeterminado de la trayectoria permite que el robot recorra de forma suave y uniforme el trayecto deseado hasta la posición de agarre. Al igual que una solución de navegación, el sistema ayuda al operador a guiar el brazo del robot hasta una posición de agarre segura, si es necesario pasando junto a otros objetos desconocidos y peligrosos. Para ello calcula un pasadizo seguro y ayuda al operador a seguir en él mediante feedback háptico.
 Extreme Robotic Lab")
El sistema traslada los movimientos naturales exactos de la mano del operador en tiempo real a los movimientos correspondientes del robot. "En este punto, el operador controla el robot utilizando únicamente el dispositivo háptico. Si el robot se sale de la trayectoria deseada, lo detecta en el agarre y puede hacer que el robot vuelva a la trayectoria. Cuando el robot alcanza la posición de agarre, el operador percibe una fuerte resistencia en el agarre del dispositivo háptico, por lo que ya no puede mover el robot". De este modo, el operador conserva siempre el control manual y puede tomar el relevo en caso de que fallen los componentes. Para ello puede desconectar la IA y volver a la inteligencia humana desactivando el modo "force-feedback". De acuerdo con el principio de control compartido entre el hombre y la máquina, el sistema permanece en todo momento bajo control, algo esencial en un entorno con el máximo nivel de peligro.
Cámara
"Para todas nuestras tareas de planificación de agarre autónomo, control remoto y seguimiento visual de objetos, utilizamos cámaras 3D modelo Ensenso N35 con LED azules (465 nm) montadas en el efector final de los robots junto con otras herramientas", comenta el Dr. Naresh Marturi. La mayoría de los sistemas de Extreme Robotic Lab contaban hasta el momento con una sola cámara 3D. "Sin embargo, para acelerar aún más el proceso de generación de modelos en 3D, los sistemas se han actualizado recientemente y ahora utilizan otras tres cámaras 3D Ensenso además de la cámara montada en el robot".
La serie Ensenso N es perfecta para esta tarea. Ha sido concebida específicamente para el uso en entornos sometidos a condiciones muy duras. Gracias a su diseño compacto, la serie N ahorra espacio y es adecuada para la captura 3D de objetos estáticos o en movimiento en aplicaciones estacionarias o móviles sobre un brazo robótico. El proyector integrado proyecta mediante una máscara de patrones con patrón de puntos aleatorio una textura de gran contraste sobre el objeto a reproducir para compensar así, incluso en condiciones de luz adversas, las texturas pobres o inexistentes. La carcasa de aluminio de los modelos N30 garantiza una óptima disipación del calor de los componentes electrónicos y, por lo tanto, una luminosidad estable incluso en condiciones ambientales extremas. Esto asegura una alta calidad y consistencia de los datos 3D. El proyector integrado proyecta mediante una máscara de patrones con patrón de puntos aleatorio una textura de gran contraste sobre el objeto a reproducir para compensar así, incluso en condiciones de luz adversas, las texturas pobres o inexistentes.
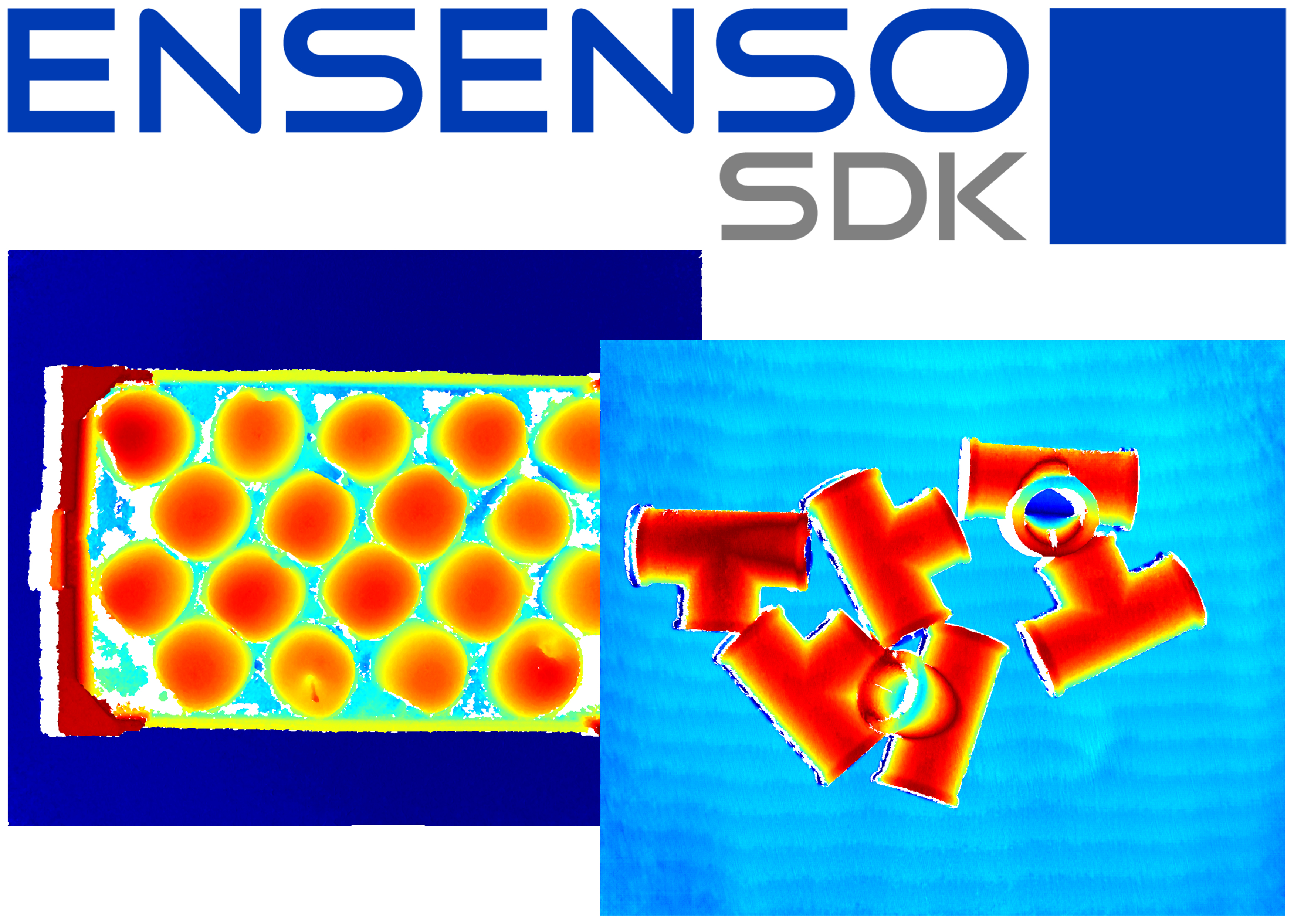
Las cámaras de la familia Ensenso N se pueden configurar y operar fácilmente por medio del Ensenso SDK. Ofrece un procesamiento de imágenes basado en GPU para agilizar aún más el tratamiento de los datos 3D y permite obtener una única nube de puntos 3D de todas las cámaras utilizadas en operaciones multicámara, además de la composición en vivo de nubes de puntos 3D desde múltiples perspectivas.
Para el sistema de asistencia, los investigadores desarrollaron su propio software en C++ para procesar las nubes de puntos 3D registradas por las cámaras. "Nuestro software utiliza el Ensenso SDK (multi-threaded) y sus rutinas de calibración para superponer la textura a las nubes de puntos de alta resolución y, a continuación, transformar estas nubes de puntos con textura en un sistema de coordenadas mundial", explica el Dr. Naresh Marturi. "Resulta bastante fácil integrar el Ensenso SDK en nuestro software C++. Ofrece una amplia gama de funciones nada complicadas y de métodos para registrar y manejar las nubes de puntos y las imágenes de las cámaras. Además, las rutinas del SDK con soporte CUDA nos permiten registrar varias nubes de puntos de alta resolución para generar nubes de escena de alta calidad en el global frame. Esto es muy importante para nosotros, sobre todo para generar hipótesis de agarre precisas".
Ventajas clave del sistema:
- El sistema, y no el operario, analiza la escena para evaluar la accesibilidad y la manipulación del objeto y le ayuda a desplazarse al lugar exacto en el que el robot puede agarrar mejor el objeto.
- La retroalimentación háptica permite al operador sentir el robot en su mano, incluso cuando el robot no está frente a él.
- Combinando el control háptico y la planificación del agarre los operadores pueden mover objetos en una escena lejana de forma muy fácil y rápida y con mucho menos esfuerzo cognitivo.
Esto ahorra tiempo y costes, evita fallos y aumenta la seguridad.

Perspectiva
Los investigadores del Extreme Robotic Lab de Birmingham están trabajando en una ampliación del método para poder utilizar una mano con varios dedos en lugar de una pinza de mordazas paralelas. El objetivo es aumentar la flexibilidad y la fiabilidad en el agarre de objetos complejos. En el futuro el operador podrá sentir las fuerzas a las que están expuestos los dedos del robot teledirigido al agarrar un objeto. También se están desarrollando métodos de agarre totalmente autónomos, en los que el brazo robótico se controla por inteligencia artificial y se guía mediante un sistema automático de visión artificial. El equipo también está trabajando en herramientas de visualización para mejorar la colaboración entre humanos y robots con el fin de controlar robots remotamente mediante un sistema de "control compartido".
Se trata de un enfoque prometedor para la seguridad y la salud de todos: Al fin y al cabo, la manipulación de objetos peligrosos, como los residuos nucleares, para su eliminación nos concierne a todos. Mediante el registro fiable de la información relevante del objeto, las cámaras 3D Ensenso hacen una importante contribución a esta tarea cada vez más urgente en todo el mundo.
Universität Birmingham
El Extreme Robotics Lab de la Universidad de Birmingham, en el Reino Unido, es líder del mercado en el desarrollo de los componentes necesarios para el creciente esfuerzo de robotización de las instalaciones nucleares.

Cámara Ensenso 3D
Modelo utilizado: Ensenso N35

Desde hace más de diez años, redacta comunicados de prensa e informes de aplicaciones y diseña temas corporativos y comunicaciones técnicas sobre productos con la experiencia correspondiente. Gracias a su experiencia en comunicación estratégica B2B, formula mensajes precisos y ofrece contenidos fundados y técnicamente sólidos, siempre con la vista puesta en la autenticidad y la claridad.
Su proyecto
¿Cómo podemos ayudarle en su proyecto? ¡Juntos encontraremos la solución que necesita!
Vision Channel
Vídeos y sesiones en directo sobre visión artificial.
Boletín de noticias
Manténgase al día y suscríbase a nuestro boletín informativo.
Aplicaciones
Descubra cómo las cámaras industriales están diseñando el futuro.