Notas de la versión 2.5 de IDS peak
Introducción
En estas notas se explican los cambios que introduce la versión 2.5 de IDS peak. Con la nueva versión IDS peak comfortC soporta eventos e I2C. Se ha añadido además un nuevo cuadro de diálogo en IDS peak Cockpit para I2C. En U3V Transport Layer (U3VK, Windows) se puede utilizar ahora el thread IPO (hilo para optimizar el rendimiento en el registro de imágenes).
IDS peak 2.5.1
Mejoras generales
IDS peak Cockpit
Esta versión corrige varios errores en IDS peak Cockpit:
- Se ha corregido un problema con la visualización de la curva de intensidad.
- Se han corregido errores que podían producirse al abrir una cámara U3-33F0XCP o una cámara U3-33FxXLE en IDS peak Cockpit.
- Se ha revisado el comportamiento de los controles deslizantes en IDS peak Cockpit.
- Se ha corregido un error en el diálogo de carga de firmware.
Versiones de componentes modificadas en IDS peak 2.5.1
| Componente | Versión Windows | Versión Linux |
| IDS peak Cockpit | 1.7.0.0 | 1.7.0.0 |
Fecha: 2023-09-12
IDS peak 2.5
Funciones nuevas y modificadas
IDS peak Cockpit
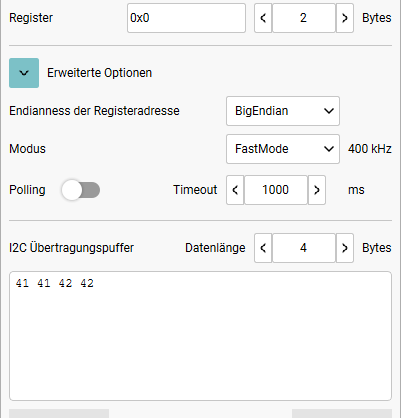
La nueva versión añade en IDS peak Cockpit un nuevo cuadro de diálogo para funciones I2C que le permite leer y escribir datos por I2C. Para poder utilizar I2C la cámara tiene que ser compatible con I2C y funcionar con una versión de firmware 3.20 o superior.

Se ha añadido a los cuadros de diálogo de los ajustes automáticos (exposición automática, ganancia automática, autofoco, balance automático de blancos) un parámetro para omitir imágenes. Este parámetro permite especificar el número de imágenes que debe excluirse del ajuste automático en el modo freerun.
Se ha optimizado el rendimiento de diversas funciones en IDS peak Cockpit, de modo que tanto el histograma como las funciones de espejo y rotación de imágenes se ejecutan más rápido.
IDS peak comfortSDK
Esta versión introduce una nueva cola de mensajes que le permite consultar, si lo desea, notificaciones sobre eventos específicos de la cámara. Esto le permite intervenir de forma selectiva, por ejemplo, cuando se ha completado el enfoque o la exposición y es necesario activar manualmente el proceso subsiguiente. Para comprender mejor cómo utilizar la nueva función disponemos de una muestra de código fuente.
También se han introducido funciones I2C para las cámaras IDS Vision. Para esta función se requiere el firmware de visión 3.20 o superior. I2C permite controlar dispositivos externos a través de la cámara (send) o desencadenar acciones en el host mediante consultas de interfaz (receive). Esto es especialmente útil, por ejemplo, en el desarrollo de dispositivos y circuitos.
Nuevos ejemplos de programación intuitiva con IDS peak comfortC
| i2c |
Ejemplo de uso de la función I2C.
La cámara debe operar con el firmware Vision 3.20 o superior. |
| message_queue |
Ejemplo de uso de eventos controlados por cámara y por host en una interfaz gráfica de usuario sencilla. El ejemplo utiliza para ello QtWidgets.
|
IDS peak genericSDK
Nuevos ejemplos de programación intuitiva con IDS peak genericC++
| afl_features_live_qtwidgtes |
Abre una cámara y muestra cómo se utiliza IDS peak AFL para controlar las funciones de autofoco en el host. El ejemplo utiliza una interfaz gráfica QtWidgets, que también incorpora una función para ajustar la ROI de autofoco dibujando un recuadro en la imagen. |
IDS peak IPL (Image Processing Library)
Se ha optimizado el rendimiento de IDS peak IPL, por ejemplo en lo que a la rotación de imágenes o el cálculo del histograma se refiere.
IDS peak AFL (Auto Feature Library)
La versión 2.4 ya introducía con IDS peak AFL una función de enfoque automático optimizado para determinadas cámaras IDS. La versión actual 2.5 refuerza la apuesta por la automatización con la inclusión del balance de blancos y la regulación del brillo automáticos. Estas prácticas funciones automáticas están disponibles tanto con IDS peak comfortC como con Python y C++ / C#.
GEV Transport Layer / U3V Transport Layer / uEye Transport Layer
Si utiliza USB3 Transport Layer (U3VK, solo Windows) puede utilizar también el thread IPO (hilo para optimizar el rendimiento en el registro de imágenes). El thread IPO incrementa sustancialmente la carga de la CPU para evitar que todos los núcleos de la CPU se pongan en modo reposo (estado C) a la vez. El thread IPO garantiza que haya como mínimo un núcleo de la CPU disponible para procesar cualquier streaming de datos que se produzca.
Mejoras generales
- En las redes de muestra para la evaluación de imágenes basada en IA los caracteres especiales no se visualizaban correctamente. También aparecían por equivocación denominaciones en alemán en lugar de en inglés.
Versiones de componentes utilizadas en IDS peak 2.5
| Componente | Versión Windows | Versión Linux |
| IDS peak comfortAPI | 1.5.0.0 | 1.5.0.0 |
| IDS peak genericAPI | 1.6.1.0 | 1.6.1.0 |
| IDS peak IPL | 1.8.0.0 | 1.8.0.0 |
| IDS peak AFL | 1.2.0.0 | 1.2.0.0 |
| IDS peak Cockpit | 1.6.0.0 | 1.6.0.0 |
| Tool Device Command | 1.4.3.0 | 1.4.3.0 |
| Tool Device Update | 1.4.4.0 | 1.4.4.0 |
| Tool IP Config | 1.4.2.0 | 1.4.2.0 |
| Tool Device Password | 1.0.0.0 | 1.0.0.0 |
| GenTL GigE Vision Userspace | 1.11.0.1 | 1.11.0.1 |
| GenTL GigE Vision Kernel | 1.11.0.1 | - |
| GigE Vision Kernel Driver (WHQL) | 1.3.1.1 | - |
| GenTL USB3 Vision Userspace | - | 1.11.0.1 |
| GenTL USB3 Vision Kernel | 1.11.0.1 | - |
| USB3 Vision Kernel Driver (WHQL) | 1.4.7.0 | - |
| GenTL uEye (uEye Transport Layer) | 1.11.0.1 | 1.11.0.1 |
| GenICam | 3.2 | 3.2 |
Productos descatalogados
A partir de esta versión IDS Vision Cockpit ya no está disponible en el menú de configuración.
Fecha: 2023-07-04