
Procedimiento Ensenso 3D
¿Cómo funciona la triangulación de puntos láser con IA?
Visión tridimensional con luz estructurada
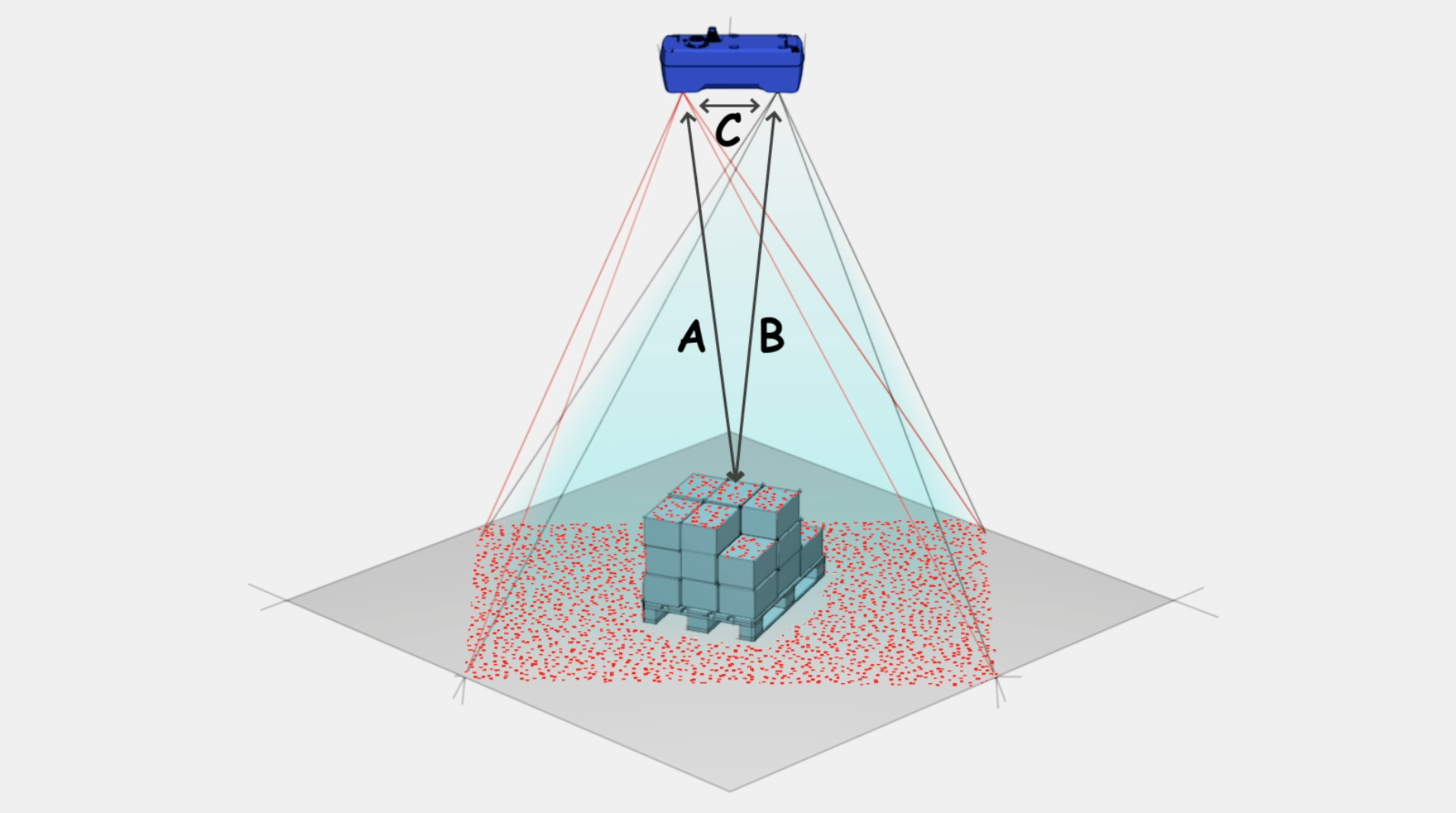
Las cámaras Ensenso de la serie S funcionan con luz estructurada. Un láser infrarrojo (IR) proyecta un patrón irregular de puntos en el espacio del objeto y son registrados por una cámara desde una posición ligeramente diferente. Sin embargo, la imagen del patrón de puntos varía en los lugares donde los objetos reflejan la luz. Los puntos correspondientes de la imagen láser se desvían de su posición prevista en función de la distancia a la que se encuentre el objeto de la fuente de luz. Las desviaciones de las posiciones de los puntos constituyen la base de la información de profundidad.
A diferencia de los métodos 3D LIDAR o Time of Flight (ToF), que también se basan en la luz láser, la profundidad espacial de cada punto de proyección capturado y, por tanto, de la nube de puntos, no resulta de medir el tiempo de la propagación de la luz, sino de una triangulación utilizada en las cámaras Ensenso Stereo Vision.
La base de este cálculo es una desviación de la posición del punto láser (= "disparidad"), que resulta de dos ángulos de observación, como en la visión espacial (visión estereoscópica). Sin embargo, los sistemas 3D como Ensenso S sólo registran el espacio del objeto con una cámara. ¿Cómo se pueden extraer las diferencias de posición de los puntos a partir de la imagen de una sola cámara del patrón proyectado?
El propio proyector es la fuente de la información necesaria. La llamada proyección DOE (óptica difractiva) genera una "imagen de puntos" fija, por lo que las posiciones de los puntos son conocidas. Conociendo la distancia y el ángulo de observación de las dos imágenes de puntos, el procedimiento de triangulación del software Ensenso puede determinar las coordenadas 3D (visibles) de cada punto láser.
Luz estructurada
El láser IR proyecta una disposición establecida de puntos de luz en el espacio del objeto. Para generar el patrón de puntos se utiliza la llamada óptica difractiva (DOE). Sus finas microestructuras garantizan la división y difracción selectiva de la luz láser para crear la distribución de luz deseada.
La DOE permite una distribución uniforme de la intensidad de la luz y también garantiza una emisión casi sin pérdidas de la energía del haz. En combinación con la luz láser de banda estrecha, se puede generar un patrón de puntos con un contraste muy alto incluso con poca luz ambiental.
Matching de puntos acelerada por la IA
Para calcular la información de profundidad mediante la triangulación, primero hay que determinar el punto de la imagen correspondiente a cada punto de proyección. Sin embargo, la identificación de un punto entre muchos no es una tarea trivial para los algoritmos de procesamiento de imágenes basados en reglas cuando las posiciones esperadas de los puntos están desplazadas por los reflejos de luz de los objetos. La solución se llama "inteligencia artificial".
¿Qué tecnología sería más adecuada para detectar y clasificar características con innumerables variaciones? El software Ensenso utiliza una RNA (red neuronal artificial) para identificar los puntos en la imagen de la cámara, que ha sido entrenada previamente con las inclinaciones y distorsiones del patrón utilizado.
Ventajas de la triangulación de puntos láser KI
Alta precisión de profundidad
Datos 3D fiables y geométricamente precisos* con una gran exactitud de profundidad gracias a la alta tasa de aciertos de la coincidencia de puntos mediante la RNA

Poca luz ambiental
Utilización con poca luz ambiental gracias a la iluminación IR
Captura rápida
Captura y evaluación de imágenes extremadamente rápidas, dado que solo se procesa una imagen de la cámara

Aceleración por IA
Hasta 20 nubes de puntos por segundo mediante la aceleración de la RNA

Sin desenfoque por movimiento
Ideal para objetos en movimiento sin desenfoque, con un tiempo de exposición breve y una alta emisión láser
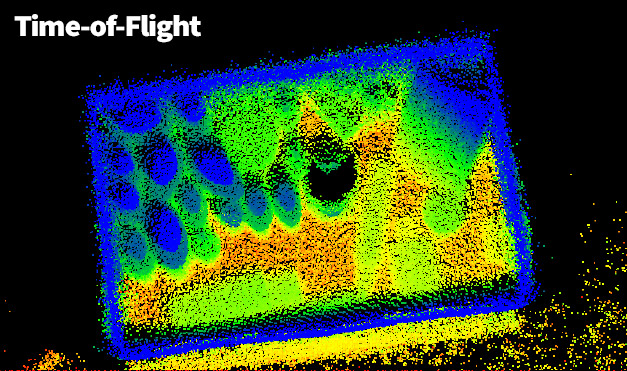
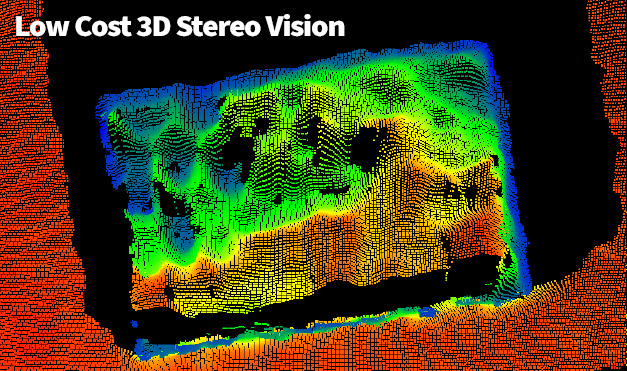
(*) Ensenso S10 genera datos 3D geométricamente precisos con gran exactitud de profundidad en comparación con las cámaras 3D que utilizan técnicas de tiempo de vuelo (ToF) o de visión estereoscópica 3D de bajo coste.
SELECTOR DE ENSENSO
Nuestro selector de cámaras Ensenso le facilitará la tarea de seleccionar sus componentes. Después de introducir las condiciones de trabajo en el configurador online, esta solución le propone la mejor combinación posible de sistemas Ensenso para su aplicación.


